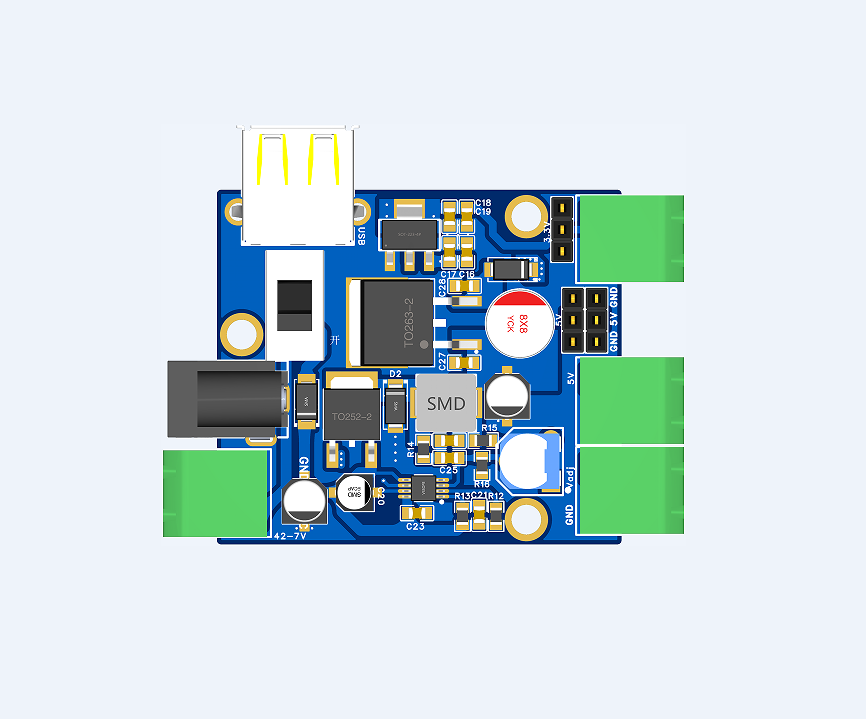
一、概述 最近想学习电机控制,觉得未来的方向一个是AI一个执行,由于市面没有售卖雅特力官方的电机控制开发板,参考官方给出的原理图,进行修改,制作嘉立创免费打板的电机开发板,并且满足雅特力官方接口的电机开发板。 二、参数 供电:6-60V直流 pcb尺寸:9.9*9.9cm
 发布于 2025-04-23
发布于 2025-04-23
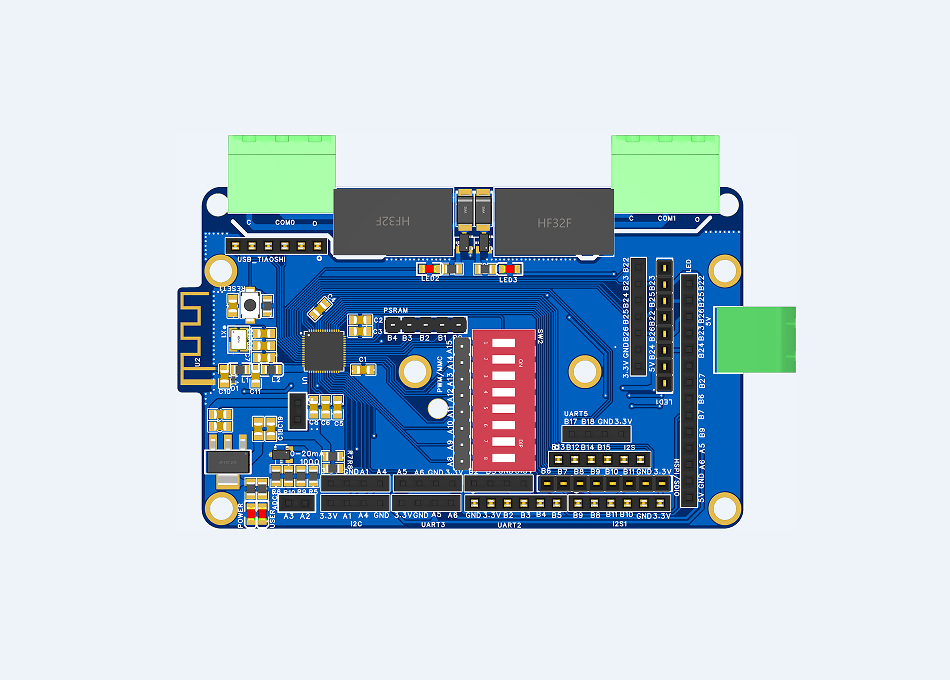
一、产品简介: 基于at32f415单片机、射频接收模块、射频遥控、esp12无线模块、8路继电器模块、中间继电器,10路拨码开关(2路模式选择、8路开关模式选择(自锁、点动)),控制最多8路开关状态(自锁、点动,可控制点动闭合时间长度),利用中间继电器采集8路开关状态,并通过esp12进行联网上传
发布于 2024-12-06
万物互联,真的费钱么? 告诉大家一个低成本的万物互联的方案。 一、mqtt服务器 先白嫖一个mqtt服务器EMQX Platform 控制台,对于个人用户,Serverless版本就足够使用了,每个月的免费额度,够够的了,不用花一分钱。
发布于 2024-11-16
一、产品简介: 基于AT32f421c8t7单片机分时方案。 控制8颗WS2812B灯珠,可以调整亮灯模式、颜色、闪烁速度、亮度等。 常开型磁控开关检测车速,并根据车速调整闪烁频率,通过车速下降阈值判断刹车信号。 无源蜂鸣器进行声音提醒,程序内有音乐代码,可以用蜂鸣器播放“小燕子”音乐。 2路rcw
发布于 2024-08-13
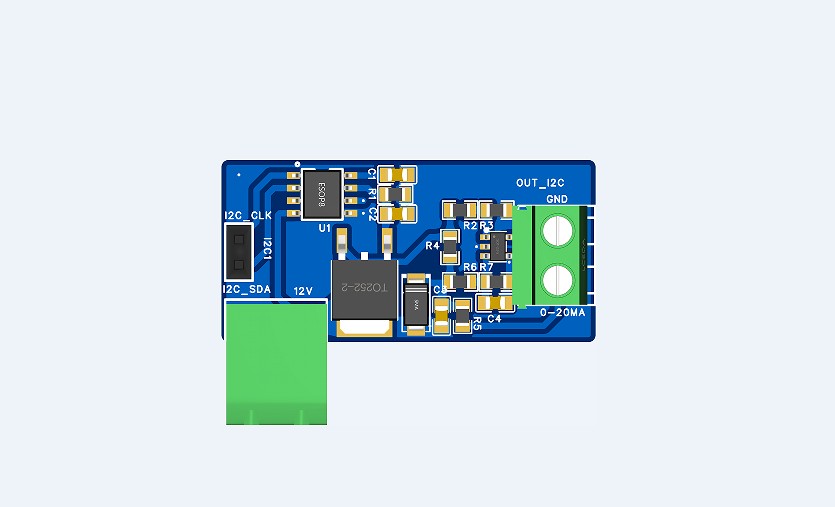
一、pwm转4-20mA模拟量(共地型) 10-40V电源供电 分辨率12位,(1/4096)*20mA 二、iic转4-20mA模拟量(共地型)
发布于 2024-04-26